
🚀 哈啰一面真题
题目内容
题目截图
1. 常用集合,介绍HashMap与CurrentHashMap的区别
- HashMap 不是线程安全的。CurrentHashMap 是线程安全的,主要是
- ConcurrentHashMap 1.7 版本内部维护了一个
Segment数组,每个Segment继承自ReentrantLock,并管理哈希表的一部分。并发写操作只有在操作同一个 Segment 时才会阻塞,访问不同 Segment 的写操作可以并行,读操作在大多数情况下甚至无需加锁,这大大提高了并发性能。 - CurrentHashMap 1.8 版本的并发控制粒度更细。它不再有
Segment这种结构,而是直接在每个哈希桶(数组元素)上进行同步- 对于数组元素的更新,或者链表/红黑树中节点的添加、删除等操作,通常是锁定该哈希桶的头节点,这里使用了
synchronized关键字(JVM 在这方面做了优化)。 - 对于一些非阻塞的操作,如数组的初始化、扩容过程中的状态更新、链表转红黑树等,会利用 CAS 操作配合
volatile变量来实现高效的无锁或低锁同步。
- 对于数组元素的更新,或者链表/红黑树中节点的添加、删除等操作,通常是锁定该哈希桶的头节点,这里使用了
- ConcurrentHashMap 1.7 版本内部维护了一个
- Null 键和 Null 值:
HashMap允许存储null键和null值。ConcurrentHashMap不允许存储null键和null值(尝试放入 null 键或 null 值会抛出NullPointerException)。这是为了在并发环境下避免歧义和同步问题,因为get(key)方法返回null可能意味着键不存在,也可能意味着键存在但其值为null,在并发环境下难以区分。
2. synchronized与ReentrantLock的区别
synchronized 基于 JVM 的锁,ReentrantLock 基于JAVA 的 API ,主要依赖于 AQS (AbstractQueuedSynchronizer) 框架实现的。
ReentrantLock 公平/非公平(默认是非公平)。synchronized 是非公平。
ReentrantLock 手动加/解锁,synchronized 自动加/解锁。
ReentrantLock 支持
lockInterruptibly()方法实现可中断的锁等待,synchronized不支持线程锁等待的中断,线程只能等待锁的释放。ReentrantLock 支持通过
tryLock设置超时时间,避免死锁。synchronized不支持线程等待锁的超时控制。
补充AQS
AQS 起到了一个抽象、封装的作用,将一些排队,入队,中断等方法提取出来,便于其他相关的JUC 锁的使用。
它主要维护了一个 共享状态 state, 和一个先进先出的 FIFO 的等待队列。来管理线程对共享资源的访问。
state 由 voliate 修饰,表示当前资源的状态,在独占锁中,state=0/1 占用/
当线程尝试获取资源失败时,会会被加入到 AQS 等待队列中。这个队列是一个变体的CLH ,采用双向链表的结构。节点包含了线程的引用,等待状态以及前驱和后继节点的指针
AQS 常见的实现就是 ReentrantLock。
3. 公平锁的底层实现
公平锁的核心在于“先来先得”的原则,它保证了多个线程在尝试获取锁时,是按照它们请求锁的顺序来获得锁的。这与非公平锁不同,非公平锁允许“插队”,即新来的线程在某些情况下可能比等待队列中的线程先获取锁。公平锁的实现成本通常比非公平锁高一些,吞S吐量可能略低,但能避免线程饥饿。
Java 中 ReentrantLock 的公平模式实现主要依赖于 (AQS) 框架。AQS 内部维护了一个双向链表组成的等待队列,用于存放那些未能成功获取锁而被阻塞的线程。每个节点代表一个等待的线程,并存储了线程的状态信息。
线程尝试获取公平锁时,首先会检查同步状态(表示锁是否被持有)。关键在于,即使当前同步状态是空闲的(锁可用),它还会进一步检查 AQS 的等待队列中是否已有线程在排队。这个检查通常通过调用 hasQueuedPredecessors() 方法来实现。
只有当同步状态空闲 并且 hasQueuedPredecessors() 返回 false(即等待队列中没有线程或者当前线程就是队列的头一个),当前线程才会尝试去修改同步状态,独占锁资源。如果尝试成功,线程获得锁;如果失败(例如并发竞争),则同样会进入等待队列。
当持有锁的线程释放锁时,它会唤醒等待队列中的头节点线程。被唤醒的线程(现在是队列的头一个)将有机会尝试获取锁。由于公平锁的排队机制,通常情况下,被唤醒的线程能够成功获取到锁,从而保证了“先入先出”的顺序。
4. Spring的循环依赖问题,以及解决方案
Spring 通过三级缓存和提前暴露未初始化完成的 Bean 对象来解决循环依赖问题。这一机制的核心是打破 Bean 创建过程中的“先完全初始化再暴露”的常规流程,允许在部分初始化阶段共享对象引用。
- 三级缓存的作用 Spring 使用三个 Map(即三级缓存)管理 Bean 的不同状态:
● singletonObjects:存放完全初始化后的单例 Bean。
● earlySingletonObjects:存放已实例化但未完成初始化的 Bean(早期引用)。
● singletonFactories:存放 Bean 的工厂对象(ObjectFactory),用于生成早期引用。 核心逻辑:当检测到循环依赖时,Spring 会通过 singletonFactories 提前生成一个未完成初始化的 Bean 引用,供其他 Bean 依赖注入使用。 - Bean 创建流程中的关键步骤 以 Bean A 依赖 Bean B、Bean B 又依赖 Bean A 为例:
● 步骤 1:创建 Bean A 时,调用构造器实例化 A,此时 A 尚未完成属性填充,会被包装为 ObjectFactory 存入 singletonFactories。
● 步骤 2:为 A 注入属性时,发现需要 Bean B,触发 B 的创建。
● 步骤 3:创建 Bean B 时,同样实例化 B 并存入 singletonFactories。
● 步骤 4:为 B 注入属性时,发现需要 Bean A,此时会从 singletonFactories 获取 A 的工厂对象,生成 A 的早期引用并存入 earlySingletonObjects,完成 B 的初始化。
● 步骤 5:B 初始化完成后,A 继续完成属性注入和初始化流程。
关键点:通过提前暴露未初始化的 Bean 引用,Spring 切断了循环依赖的等待链条。
5. MySQL 为什么选择 B+ 树?
MySQL 默认的存储引擎 InnoDB 采用的是 B+ 作为索引的数据结构,原因有:
B+ 树的非叶子节点不存放实际的记录数据,仅存放索引,因此数据量相同的情况下,相比存储即存索引又存记录的 B 树,B+树的非叶子节点可以存放更多的索引, 因此 B+ 树可以比 B 树更「矮胖」,查询底层节点的磁盘 I/O 次数会更少。
B+ 树有大量的冗余节点(所有非叶子节点都是冗余索引),这些冗余索引让 B+ 树在插入、删除的效率都更高,比如删除根节点的时候,不会像 B 树那样会发生复杂的树的变化;
B+ 树叶子节点之间用链表连接了起来,有利于范围查询,而 B 树要实现范围查询,因此只能通过树的遍历来完成范围查询,这会涉及多个节点的磁盘 I/O 操作,范围查询效率不如 B+ 树。
为什么不用红黑树?
至于为什么不使用红黑树等二叉查找树结构,主要原因在于数据存储介质的不同。红黑树是高度平衡的二叉树,非常适合数据存储在内存中(如Java的TreeMap)。 但在数据库中,数据存储在磁盘上,每次节点访问都需要进行磁盘I/O。红黑树的每个节点只包含一个键和两个子节点指针,导致树的高度相对较高。对于海量数据, 查找路径会非常长,需要大量的磁盘I/O,效率远低于B+树这种为降低磁盘I/O而设计的“矮胖”结构。
6. MySQL RR 隔离级别是如何实现的?
InnoDB 实现 REPEATABLE READ 隔离级别主要依赖于多版本并发控制(MVCC)。对于普通的 SELECT 查询(不加锁),InnoDB 通过保存数据行的多个版本来实现。 当一个事务开始时,它会读取数据的一个“快照”版本。在事务的整个生命周期内, 对该事务可见的数据版本保持不变,即使其他事务提交了对同一数据的修改,当前事务也看不到这些修改, 从而避免了脏读和不可重复读。
MVCC 实现
MVCC 允许多个事务同时读取同一行数据,而不会彼此阻塞,每个事务看到的数据版本是该事务开始时的数据版本。这意味着,如果其他事务在此期间修改了数据,正在运行的事务仍然看到的是它开始时的数据状态,从而实现了非阻塞读操作。
对于「读提交」和「可重复读」隔离级别的事务来说,它们是通过 Read View 来实现的,它们的区别在于创建 Read View 的时机不同,大家可以把 Read View 理解成一个数据快照,就像相机拍照那样,定格某一时刻的风景。
- 「读提交」隔离级别是在「每个 select 语句执行前」都会重新生成一个 Read View;
- 「可重复读」隔离级别是执行第一条 select 时,生成一个 Read View,然后整个事务期间都在用这个 Read View。
Read View 有四个重要的字段: 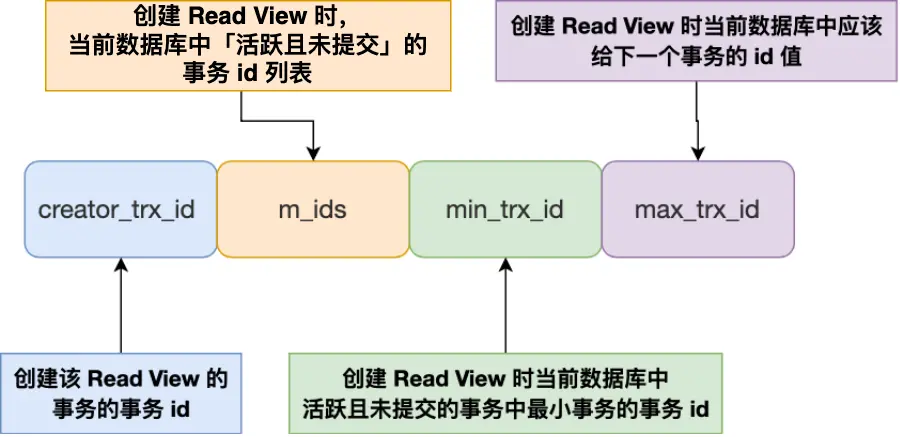
- m_ids:指的是在创建 Read View 时,当前数据库中「活跃事务」的事务 id 列表,注意是一个列表,“活跃事务”指的就是,启动了但还没提交的事务。
- min_trx_id:指的是在创建 Read View 时,当前数据库中「活跃事务」中事务 id 最小的事务,也就是 m_ids 的最小值。
- max_trx_id:这个并不是 m_ids 的最大值,而是创建 Read View 时当前数据库中应该给下一个事务的 id 值,也就是全局事务中最大的事务 id 值 + 1;
- creator_trx_id:指的是创建该 Read View 的事务的事务 id。
对于使用 InnoDB 存储引擎的数据库表,它的聚簇索引记录中都包含下面两个隐藏列:
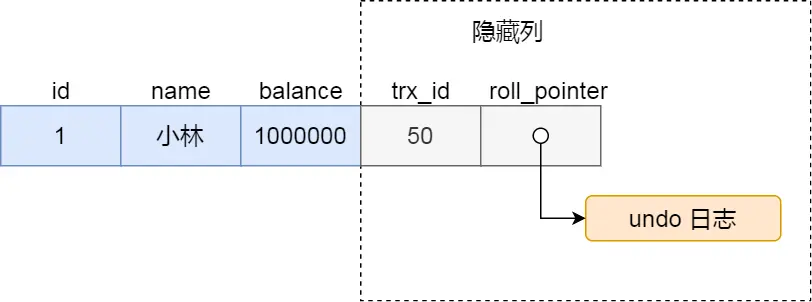
- trx_id,当一个事务对某条聚簇索引记录进行改动时,就会把该事务的事务 id 记录在 trx_id 隐藏列里;
- roll_pointer,每次对某条聚簇索引记录进行改动时,都会把旧版本的记录写入到 undo 日志中,然后这个隐藏列是个指针,指向每一个旧版本记录,于是就可以通过它找到修改前的记录。
在创建 Read View 后,我们可以将记录中的 trx_id 划分这三种情况: 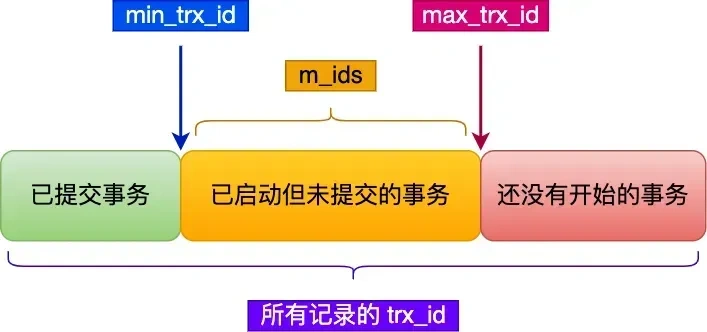 一个事务去访问记录的时候,除了自己的更新记录总是可见之外,还有这几种情况:
一个事务去访问记录的时候,除了自己的更新记录总是可见之外,还有这几种情况:
如果记录的
trx_id值小于Read View中的min_trx_id值,表示这个版本的记录是在创建Read View前已经提交的事务生成的,所以该版本的记录对当前事务 可见。如果记录的
trx_id值大于等于Read View中的max_trx_id值,表示这个版本的记录是在创建Read View后才启动的事务生成的,所以该版本的记录对当前事务 不可见。如果记录的
trx_id值在Read View的min_trx_id和max_trx_id之间,需要判断trx_id是否在m_ids列表中:- 如果记录的
trx_id在m_ids列表中,表示生成该版本记录的活跃事务依然活跃着(还没提交事务),所以该版本的记录对当前事务 不可见。 - 如果记录的
trx_id不在m_ids列表中,表示生成该版本记录的活跃事务已经被提交,所以该版本的记录对当前事务 可见。
- 如果记录的
这种通过「版本链」来控制并发事务访问同一个记录时的行为就叫 MVCC(多版本并发控制)。
7. 如何保证Redis与mysql的缓存一致性
方法一:
先更新数据库,在删除缓存 还是 先删除缓存,再更新数据库 ?
核心在于分析两种策略的形成的时间窗口的大小。
- 先删除缓存再更新数据库: 因为更新数据库是相对耗时的,而删除缓存确很快,之间会形成比较长的时间窗口。如果别的请求过来,读取了数据库中的旧数据,还写入缓存就错了!
- 先更新数据库再删除缓存: 此处的时间窗口在更新数据库之后,耗时的操作已经完成了,加上删除缓存很快,之间形成的时间窗口很小。之间就很少有请求的访问了。
方法二:
延迟双删 针对 「先删除缓存,再更新数据库」的不一致情况, 存在较大的时间窗口, 如果能够在更新完数据库之后,去删除之前错误的缓存数据就好了。
缓存双删的步骤
- 第一次删除缓存。
- 更新数据库。
- 等待一段时间 (延迟)。 这个延迟时间需要根据你的业务场景来确定,理论上应该大于一个典型的读请求从发起、读数据库、到写入缓存的整个过程所需的时间。
- 第二次删除缓存。(删除了旧缓存数据)